Observations

Unpacking the Problem: Exploratory Research in T-11 Parachute Packing
The Aerial Delivery & Field Services Department (ADFSD) needed to enhance the efficiency of its T-11 personnel parachute packing process, a critical but labor-intensive task, amidst ongoing manpower shortages. Automation seemed like the obvious solution, but was it the right one? Our challenge was to deeply understand the domain, uncover root problems, and identify opportunities for improvement—all without compromising the safety-critical nature of the work.
As a UX researcher in a team of four, I:
- Led in-depth ethnographic studies and contextual inquiries at Fort Gregg-Adams, observing and interviewing parachute packers and inspectors.
- Facilitated and analyzed semi-structured interviews with 25+ riggers and inspectors to understand their needs, pain points, and workflows.
- Synthesized research findings using journey mapping and affinity diagramming to extact key insights and reframe the problem.
- Collaborated with the team and executive directors to define a research plan, prioritize assumptions, and guide design solutions based on user feedback.
Capstone Group of 3 + myself
8 months
(2023-2024)
Context
Understanding the high-stakes environment of T-11 parachute packing
One packer summed up the experience:
" It's like you're in a napkin-folding factory. „
The T-11 personnel parachute, while far more consequential than a napkin, shares its monotony. These chutes are used for low-altitude static line jumps in US military operations. At Fort Gregg-Adams, the Aerial Delivery & Field Services Department (ADFSD) meticulously inspects and packs these chutes, ensuring they're ready for immediate deployment. Before becoming a certified rigger, new recruits undergo 14 weeks of intensive training, culminating in a jump using a self-packed parachute– a testament to the confidence in their work.
Despite their dedication, the ADFSD faced challenges meeting throughput demands. With manpower stretched thin, the department considered automation as a potential solution.
But was automation the right answer?
Dual row static line jump from a USAF C-17 Globemaster
Our mission
To uncover the true nature of these challenges, we immersed ourselves in this high-stakes environment.
Engaging with 25 riggers and inspectors–
a small subset of over
2,000
parachute riggers
who support an average of
250,000
jumps annually
–we aimed to identify pain points and opportunities for improvement through a comprehensive research approach.
Research approach
Using immersive methods to uncover inefficiencies and pain points
Understanding the packing process was our first priority.
There was only so much to learn from desk research. To get a genuine feel for the process, my team and I traveled to Fort Gregg-Adams, VA, to observe and interact with riggers and inspectors on the pack floor.
Contextual inquiry on the pack floor
The T-11 packing procedure isn't as simple as folding a bedsheet (a challenge in itself). It involves a sequence of steps, punctuated by 8 critical rigger checks where inspectors verify the work before riggers can proceed. These checks are non-negotiable, but they also introduce pauses that can disrupt workflow.



Learning about parachute packing firsthand from experienced 92R Riggers
We watched riggers navigate through the packing steps, noting how each task flowed into the next– or didn't.
We noted moments when riggers were idle, waiting for inspectors, and times where inspectors were overwhelmed.
We observed deviations from the packing procedure due to differences in size and strength.
Semi-structured interviews
Observations gave me the what, but I also needed to understand the why. I sat down with riggers and began with a set of guiding questions, generating more as the conversation took direction.
Can you walk me through a typical packing session, start to finish?
How does waiting for inspections affect your focus and efficiency?
If you could change one thing about the process, what would it be?
Ethnographic engagement
It was difficult to imagine handling the massive 155 m2 (1670 ft2) canopy 17 kg (38 lbs) without one to fold and finesse. The ADFSD obliged our request and sent over a T-11 to practice with.
Practicing methods of folding a T-11 parachute on an impromptu rigger table
Learning to fold this jumble of fabric and lines helped me empathize with the parachute riggers, especially as I repeated the process. I recognized areas that personally caused physical strain. I also noted the cognitive load required for precision and how it changed from one task to the next.
Analogous domain exploration
I also wanted to see how other industries tackled similar challenges. What domains share similarities with personnel parachutes, and what can we learn from them?

Face mask manufacturing
During the COVID-19 pandemic, mask manufacturers in China and Korea scaled up production while ensuring quality through machine vision-driven defect detection. Could ADFSD adapt automated inspection technologies to take some of that stress off the rigger?
.png)

Automatic optical system + anomaly detection model used to inspect and identify flaws in FFP2 masks
(https://www.data-spree.com/blog/reliable-automation-of-ffp2-mask-production-with-ai-quality-inspection)
Automotive airbag assembly
Notably, automotive airbags share many qualities with personnel parachutes. They are an intricate contraption of inflating fabric that must deploy perfectly to save the user's life. I learned that airbags are packed using specialized robotic systems for precise folding thanks to the many machine-interactable surfaces on the material. Perhaps automation will involve modifying the parachute to facilitate machine interfacing.
Synthesizing insights
Distilling observations into actionable opportunities for improvement
With a wealth of data, we needed to make sense of it all. We employed several techniques:
Journey mapping physical stressors
We mapped each step in the packing process. This visual representation allowed us to document every action the riggers perform and note the tools, interactions, and dependencies between tasks. By overlaying data on psychomotor strain, we pinpointed 3 areas where riggers experienced most fatigue and discomfort.

Journey map categorizing various physical rigger stressors during the pack process
Affinity diagramming
Next, we gathered all the data points– quotes, observations, notes– and began clustering them based on emerging themes.

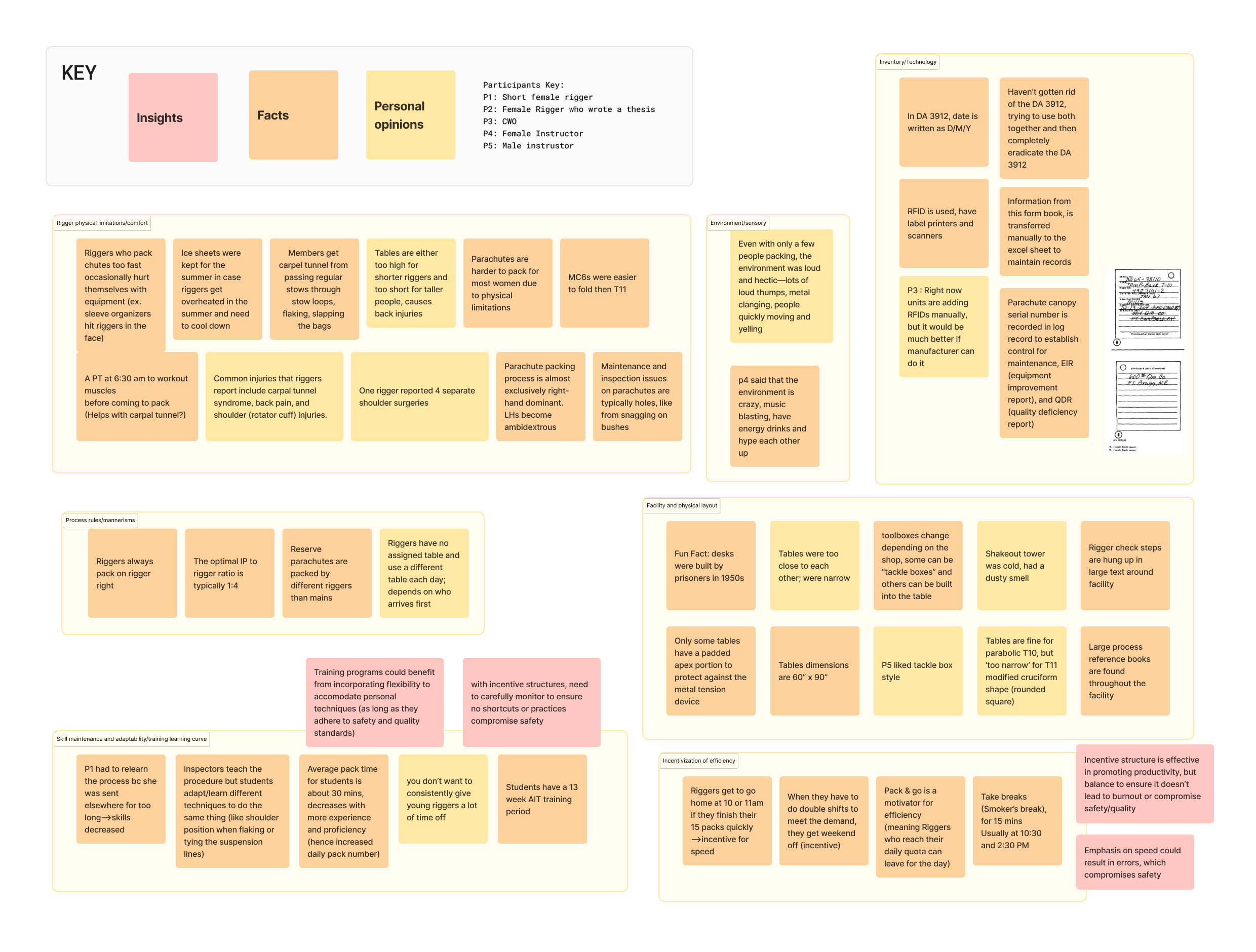
Grouping findings via affinity diagramming
Primary themes emerged, such as workflow bottlenecks and physical ergonomic strain, monotony, and process inefficiencies. It was important to revisit clusters as new findings emerged and see if the themes still held true.
From here, we synthesized the following 4 insights about the ADFSD's current packing practices:
01
The rigger-inspector ratio creates a major bottleneck.
We observed frequent, lengthy waits for inspector checks, interrupting workflow. The rigger is often ready to move to the next step, but has to wait for inspector approval at least 8 times during each parachute pack. Riggers express frustration about losing momentum, feeling slowed down by the system. This dependence on inspectors, while crucially redundant for safety, limits overall efficiency.
Not relying completely on inspectors to move to the next step can increase efficiency.
02
The rigidity of the current packing system takes a toll on rigger physical health.
The rigid, one-size-fits-all approach to the packing process puts unnecessary strain on the riggers. Tables are fixed, tools are awkward, and the repetitive motions take a toll. Injuries like carpal tunnel and rotator cuff tears are a direct result of this mismatch between rigger needs and the workspace. Injuries result in a significant number of lost workdays per year, either directly (absence) and/or indirectly (reduced performance).
Shifting towards a more adaptable process ensures a healthier and more productive work environment.
03
Rigger morale is undermined by monotony.
We asked many riggers what they were thinking about at various parts of the process, only to find the most common answer is “nothing.” Incidentally, the highest number of errors occur when the brain is not engaged in the task at hand, instead relying on imprecise motor memory.
In contrast with the creative aspects of aerial delivery, parachute packing currently offers limited variability in tasks and few opportunities for true collaboration.
Addressing the monotonous nature of parachute packing can increase rigger engagement and satisfaction.
04
Small inefficiencies waste manpower and time.
Observing pack floors in process, we found many suboptimal tasks that add up throughout the day. For instance, each rigger check involves 45+ seconds of waiting. When each parachute involves 8+ rigger checks, this adds up to over 90 minutes daily.
Riggers also complain about clunky record-keeping with the archaic DA-3912, and problematic tools that hamper the workflow.
Targeted optimization of the parachute packing process can free up manpower and improve efficiency.
Reframing the challenge
Rethinking constraints to identify the true barriers to progress
Our initial focus on optimizing the packing process revealed deeper, systemic issues. Inspired by Tina Seelig's reframing methods, I employed the '5 whys' technique to question trace our system's constraints back to their roots.
Why do riggers have to wait for inspectors?
Inspectors are busy with multiple riggers simultaneously.
Why are inspectors handling multiple riggers at once?
Because the established ratio of inspectors:riggers is 1:4.
Why is the inspector-to-rigger ratio low?
Manpower shortages, resource allocation, historical protocols.
Why can't we adjust the ratio or process?
Constraints in staffing and strict adherence to existing protocols.
Why are current protocols inflexible?
They were designed without considering scalability and evolving needs.
Each insight reflects an area of opportunity, but collectively, they paint a clear picture: we’ve been focusing on optimizing a system that has inherent limitations. Addressing ergonomics, morale, and inefficiencies can provide temporary relief, but they won’t solve the core issue.
The true roadblock to achieving ADFSD's goals of efficiency, manpower optimization, and a future-proof packing solution lies not within the process itself, but within the T-11 parachute design, leading us to...
Insight 5:
05
The T-11 Parachute design inhibits true automation.
What we observed
The T-11’s canopy, deployment bag, drogue chute, and pack tray have unique materials and complex folds that require human dexterity. While these are suited for human folding, they pose challenges for automated systems that need greater rigidity or structure for machine handling.
What we took from analogous domains
Automotive airbags are packed by robotic panels, and their folds are designed with that panel compatibility in mind.
Automated sleeping bag and large fabric packing utilizes rollers to facilitate machine folding and insertion into carrying cases. These techniques are difficult to translate to the complex line groups of the oddly-shaped T-11.
Experts validated our insight
We consulted robotics experts Howie Choset and Chris Harrison with our unique domain and proposed path forward.
Choset highlighted the fundamental mismatch between smooth, nonlinear objects and the existing robotic grippers.
Harrison emphasized that process improvements effectively puts a band aid on the larger problem, as the T-11 is a product of a time when human labor was the default
Impact & reflection
Shifting from quick fixes to sustainable, human-centered solutions
Outcome
We synthesized several critical insights that fundamentally changed our understanding of the problem. Our research changed how the ADFSD approached this challenge. By prioritizing rigger augmentation over full automation, we laid the foundation for solutions aimed at:
Optimizing workflows to reduce bottlenecks
Improving ergonomics to minimize physical strain
Enhancing engagement to reduce errors and improve morale
Considering long-term redesign of the parachute for automation
By reframing the problem from an automation-first approach to one that focuses on augmenting riggers’ expertise, we laid the groundwork for a more sustainable, scalable improvement plan.
Reflecting
The first half of this project underscored the value of contextual immersion and reframing in tackling ambiguous problems. Observing the packing process firsthand revealed the need to rethink assumptions, like the feasibility of full automation, and focus instead on augmenting human expertise. By reframing the problem, we shifted from patching surface-level issues to addressing the deeper challenge: the inherent limitations of the T-11 parachute design. This experience demonstrated that meaningful solutions emerge only through deep engagement with the problem space.
View our design solutions:
View our Medium publications: